

Ingenieros de la Universidad de Aeronáutica y Astronáutica de Nanjing, China, desarrollaron un robot biomimético cuadrúpedo que podría ayudar en la exploración de la superficie de Marte.
El dispositivo robótico tiene una estructura de cuerpo flexible que puede replicar los movimientos y el estilo de locomoción rastrero de un lagarto del desierto. Este robot resolvería el problema al que se enfrentan los róveres contemporáneos para moverse sobre suelos granulares blandos y escalar rocas en el planeta rojo, lo que sería de gran ayuda a las ambiciosas misiones no tripuladas.
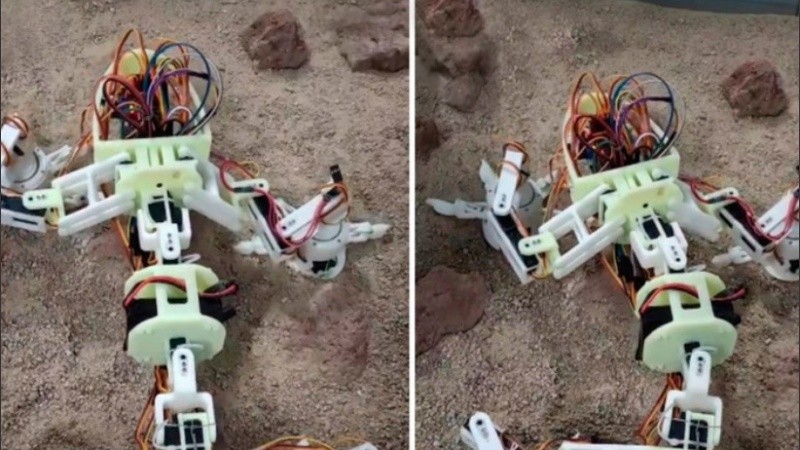
El robot biomimético creado por Chen y sus colegas se compone de una estructura flexible similar a una columna vertebral y cuatro patas. Para replicar el movimiento de "arrastre" típico de los lagartos, cada pata cuenta con dos bisagras y un engranaje que provoca un movimiento de balanceo.
Cada una de las articulaciones de la cadera que conectan la estructura de la columna con las piernas del robot está formada por dos servos y un mecanismo de cuatro articulaciones que permite que el robot se eleve sin perder el equilibrio. Los "pies" del robot tienen cuatro "dedos" flexibles, que consisten en dos bisagras y una garra.

Para replicar los movimientos de los lagartos, los investigadores crearon una serie de modelos cinemáticos para cada uno de los componentes de su robot. Luego usaron estos modelos y cálculos numéricos para planificar los movimientos del robot.
Los investigadores inicialmente evaluaron su robot en una serie de simulaciones para determinar si podía replicar efectivamente los movimientos de los lagartos. Sus resultados fueron muy prometedores, ya que descubrieron que su robot podía realizar los movimientos y el estilo de caminar deseados.
Chen y sus colegas crearon el prototipo de su robot utilizando materiales de resina impresos en 3D, un panel de servocontrol, una batería de litio y otros componentes electrónicos. Luego utilizaron un banco de pruebas de simulación para evaluar los movimientos de su prototipo de robot en superficies rocosas que se asemejan al terreno de Marte.
Ahora están trabajando en modelos de aprendizaje automático que permitirían que su robot adapte sus movimientos a diferentes terrenos. Además, planean introducir un sistema que proporcionaría alimentación continua al robot.
La exploración de Marte y su superficie es una búsqueda fascinante, ya que podría revelar signos de vida extraterrestre pasada o presente. Además de revelar potencialmente formas de vida microbiana antigua, estas exploraciones podrían conducir al descubrimiento de recursos que existen fuera de la Tierra, lo que podría allanar el camino para futuras misiones humanas a Marte.























