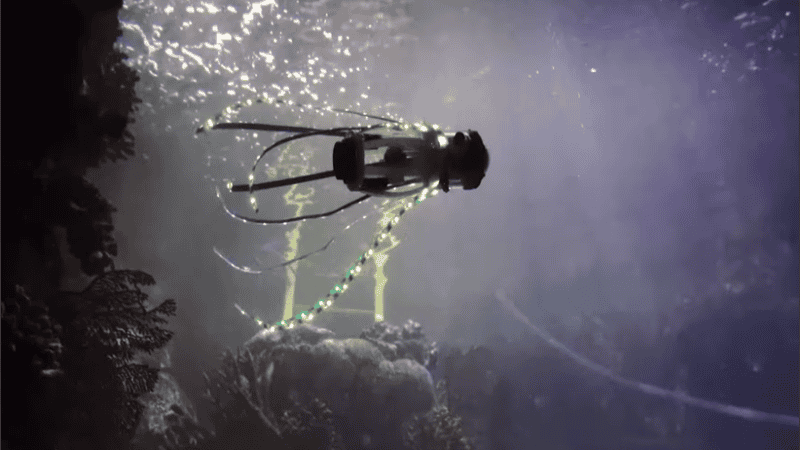
En lo que a robótica se refiere, ya es algo común ver creaciones inspiradas en la naturaleza para de esa manera adaptarlas a entornos complicados. En este caso, ingenieros de la Universidad de California, Estados Unidos, desarrollaron un "calamar robot" que podría ser utilizado en investigaciones medioambientales.
Este Squidbot (como lo llamaron) inspirado en la forma de un calamar tiene rasgos muy distintivos, como su capacidad de propulsión mediante chorros de agua y un complejo sistema de mecanismos que imitan las características del animal marino.
El cuerpo de este dispositivo está construido a partir de una combinación de materiales ligeros y rígidos que le permiten impulsarse a través del agua.
Por su diseño, es capaz de almacenar energía elástica en su piel y en el interior de su conjunto de costillas flexibles. Estas están ancladas a un par de placas circulares en cada extremo del cuerpo; una se encarga de aspirar el agua a través de una boquilla y la otra la expulsa cuando el cuerpo se contrae.
De esa manera, la propulsión se realiza mediante chorros de agua, al igual que un calamar natural. Eso le permite al robot llevar su fuente de energía en el interior de su cuerpo, lo que evita que tenga que depender de una fuente externa.
Michael T. Tolley, profesor del Departamento de Ingeniería Mecánica y Aeroespacial de la UC San Diego, asegura que "este es el primer robot sin ataduras que puede generar pulsos de chorro para una locomoción rápida". Además, Tolley destaca otras virtudes del aparato.
Su diseño le permite realizar tareas de monitorización submarina sin dañar los ambientes ni a los animales que viven en ellos, ya que cuentan con un cuerpo blando que además permitiría una multitud de usos en proyectos de investigación medioambiental como la conservación de entornos naturales marinos.
En las pruebas, el Squidbot consiguió impulsarse a una velocidad de 32 centímetros por segundo o 0.8 kilómetros por hora, lo que supone (según sus desarrolladores) todo un logro respecto a otros robots de cuerpo blando. Además es manejable, ya que el equipo demostró que cambiando la orientación de la boquilla podían dirigir al robot.